Risktamer provides the user with two main features. The passengers can now visualize the environmental obstacle distance, and also manipulate the behavior of a autonomous vehicle. As the user's sets the Risktamer to aggressive mode, the car will accelerate accelerate until it reaches a close enough distance to automatically change lanes to catch the next vehicle ahead. This setting manuvers the car to cut in and out of traffic. The rear indicator notifies the user of vehicles approaching from behind. If the rear indicator moves up towards "attentive" position, the user can pull back the control, allowing the vehicle to speed up in attempt to increase the gap between the vehicle behind.
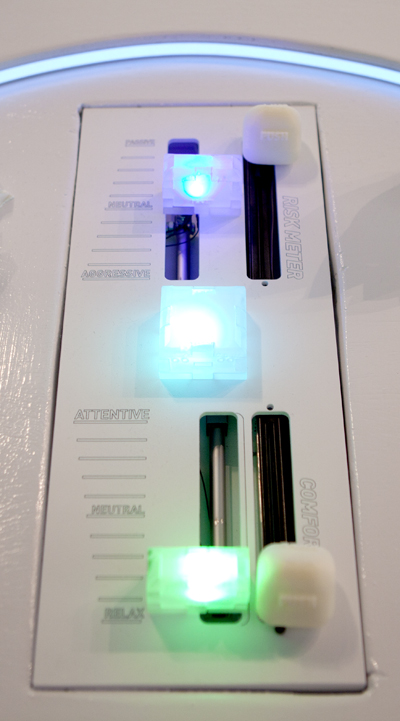
The top portion indicates cars and obstacles in front of your vehicle. the bottom part gauges the distance in the rear. The knob on the top right controls the distance between you and the cars in the front and the bottom right knob controls the distance between the cars or obstacles in the rear. It re-programs the automated car. This allows the user to adjust the performance of an automated system for reasons of safety, speed, efficiency, etc. Some reasons why you want to adjust because… eventhough the fully automated car is nice, but it is boring and possibly not safe. This is an intermediate form where system is automated but you're adjusting it, you're tuning it, changing the performance based on your knowledge as a driver, or simply based on preference. Sometimes the user would like the car to perform more easy going passive way, or you would like the car to behave more aggressive in a fast way.
Ideally, I would like the indicator and the knob to be the same element for display and control. But due to technical constraints, they are separate and the servo doesn't react as fast as the LED light. An example of this type of control is a audio mixer, you set the equalizer adjustments, and the computer works its way trying to match it, but the indicator still moves constantly based on external data.
 |
 |
 |
 |
 |
 |
|
 |
 |


 Passive and Relax Mode Passive and Relax Mode
 Aggressive and Attentive Mode Aggressive and Attentive Mode




Risktamer Experiment: Gathering data
|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
 |
|
|
|
|
|
|
|
|
|
Art Center College of Design © Link Huang 2012