n(L)ight Life-biotope PCBunny with Bousey
 Beginning questions.
Beginning questions.
-What happens when a bunny becomes a Printed Circuit Board
-What happens when a bunny becomes a Mousey?
-what happens when a bunny become a road sign?
Scenario
The PCBunny and Bousey are placed in an environment (a biotope). The goal of the project is for people to engage through proximity with the bunny-like objects, becoming part of a dialog between people and objects. When a person investigates the PCBunny, it will glow brighter giving off more light. The Bousey will seek out this light source by moving towards it. The environment will consist of 3 PCBunnys (one sign and two fuzzys) and 3 Bouseys. As people interact with the objects, they all respond to each others presence. Each 'Transitional Species' object will demonstrate the same habit (respond to light and react to close proximity) but each object will carry out variations in its behaviors.
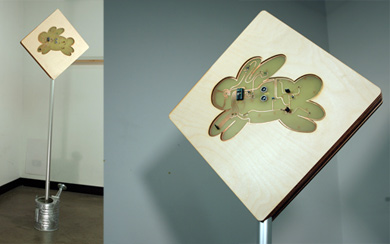 PCBunny (Sign) is a crossing sign designed to introduce people to the biotope.
PCBunny (Sign) is a crossing sign designed to introduce people to the biotope.
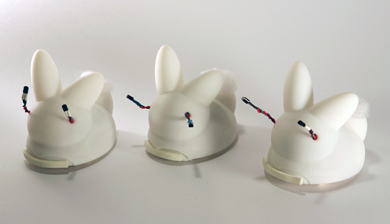 Bousey is a junkbot hack using a analog computer mouse that is tuned into a light seeking bunny robot. Bousey's outer shell is a prototype 3D model printed out of FDM. Bousey resembles a baby bunny while on the out side while internally designed and engineered to house the circuitry.
Bousey is a junkbot hack using a analog computer mouse that is tuned into a light seeking bunny robot. Bousey's outer shell is a prototype 3D model printed out of FDM. Bousey resembles a baby bunny while on the out side while internally designed and engineered to house the circuitry.
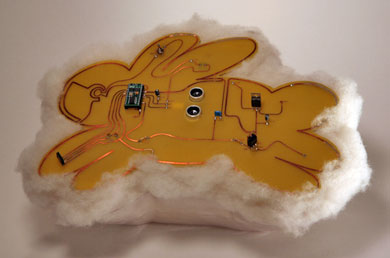 PCBunny (fuzzy) is an aestheticized circuit board in the shape of a bunny.
PCBunny (fuzzy) is an aestheticized circuit board in the shape of a bunny.
The PCBunny circuit is design to translate PWM from a ultra sonic range finder into varying degrees of luminosity. when a person or object approaches the PCBunny it becomes brighter (glowing white LEDs). As you walk away the bunny circuit dimes again.
Biotope Images
 Detail PCBunny (fuzzy).
Detail PCBunny (fuzzy).
 Detail Boucey tails.
Detail Boucey tails.
 Detail of PCBunny (sign).
Detail of PCBunny (sign).
 Time lapse of Bouseys chasing thier tails.
Time lapse of Bouseys chasing thier tails.
 Time lapse of a person approching PCBunny.
Time lapse of a person approching PCBunny.

Time lapse
 n(L)ight Life-biotope
n(L)ight Life-biotope
Construction / Scenario issues
First the original Bousey schematic I was working from had a few mistakes, the most evident one had to do with grounding the Leds and light sensors, this caused some hard ship in having to rewire the circuits. The second problem I encountered in assembling the model was securing the motors and finding the right balance between placement and weight distribution. I also experimented with a range of wheel types, the most successful solution was a set of lazier cut 1/8 in birch plywood with a sticky foam pad used for traction. This solution worked best due to the precision and fit with the motors axle. During the first demo of the scenario the LEDs within the Bouceys' tails were to bright. this resulted in them running in circles chasing there own tails. (it was pretty interesting in it self, but defeated the communication between objects intended in the scenario), The solution was to defuse the brightness of the tails by using black tape around the LEDs. This allowed for the PCBunny's to attract the Boucey's when approached by people.